
ROV Nautilus: Lessons Learned
The problems we had, and what we're doing differently.

Nautilus (UWROV’s 2021 ROV for the MATE Competition) was a cantankerous robot.
We learned some important lessons:
Integrating late = integrating poorly
Simple deployability is simply necessary
Maintainability is mandatory
Shipping is pain
Based on these lessons, we’re doing a number of things differently, detailed below.
1. Integrating late = integrating poorly
Integration is hard in any project, but doing it late makes it even harder.
The COVID-19 pandemic threw wrenches into our in-person R&D work, and delayed integration. As a result, we discovered many integration issues too late to make the necessary overhauls, hindering our ROV’s performance.
For example, our manipulator stuck out of the bottom of the ROV, so we could only set the ROV down on foam blocks (not on the floor by itself). This made servicing the ROV much more challenging than it should have been — and an expensive, teetering robot next to water is never a good idea!
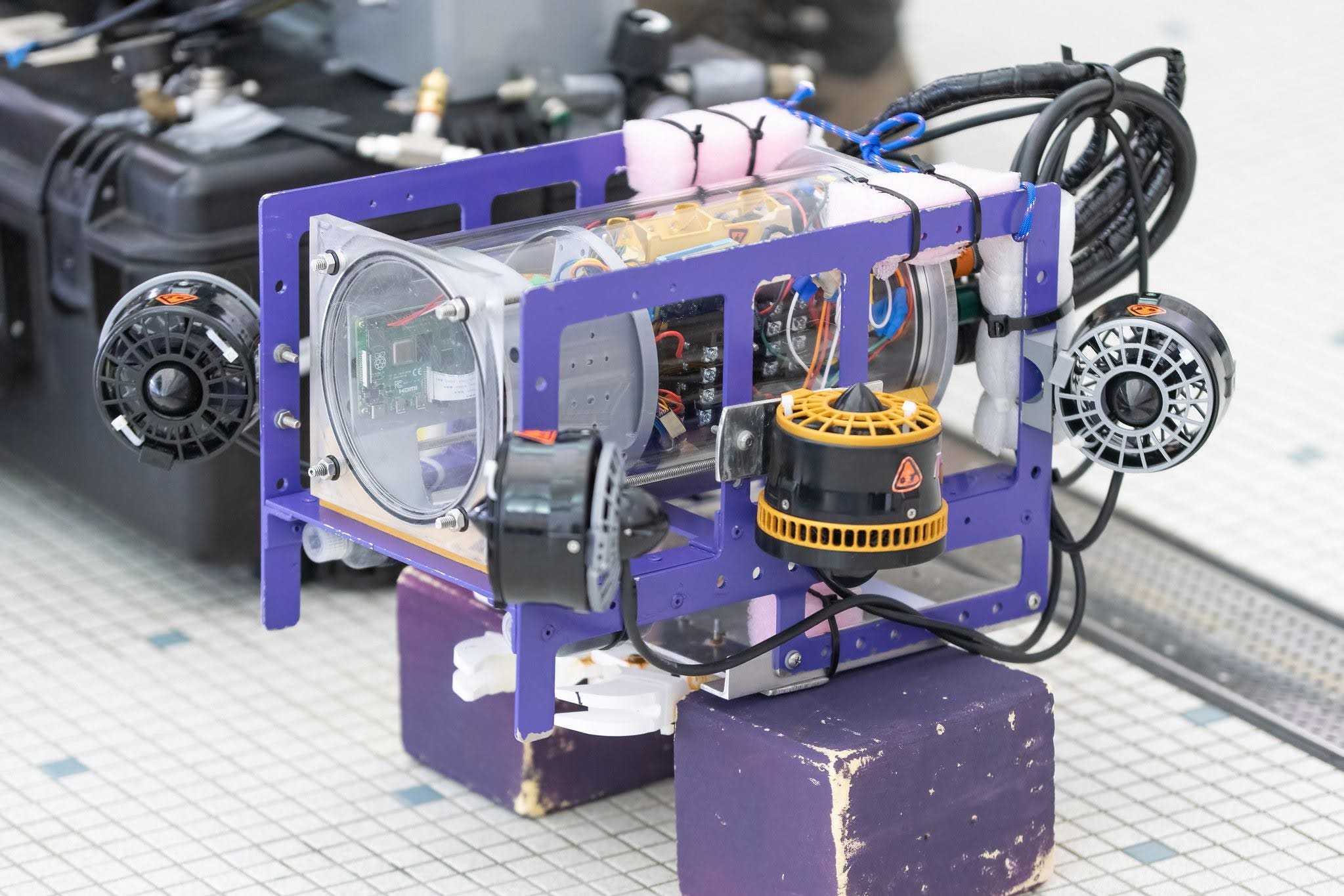
Other integration issues included parts of the robot blocking camera views, thruster exhaust getting blocked by wiring, the tether getting tangled on the frame and thrusters, and reliance on zip-tied floats to try to balance the ROV.
What we’re doing differently:
Keep our CAD model up to date with excruciating detail (down to the screw!). This lets you…
Integrate virtually, earlier, and effectively for free!
Verify fastener access, camera fields of view, etc.
Measure center of mass and center of buoyancy, and keep them close
Work cross-functionally over subsystems
Rotate people between different subsystems of the ROV
Keep the whole team in the loop about the status of the entire ROV
Add design requirements to catch integration pitfalls
“The ROV must be easy to set down”
“The ROV’s tether must not interfere with water from thrusters”
2. Simple deployability is simply necessary
Nautilus was challenging to get somewhere and deploy.
It wasn’t just that the ROV couldn’t be set down on the ground by itself — all of the support equipment was challenging to wrangle, too. Every deployment required reassembling the equipment from loose wires, boxes, peripherals, and a laptop.
Setting up the surface station included stacking electronics on a box, routing around cables and plugging everything together, screwing in fiddly connectors, and generally dealing with a rat’s nest of wires. Needless to say, this is not good next to water, nor is it good in a time-constrained competition environment, never mind both!
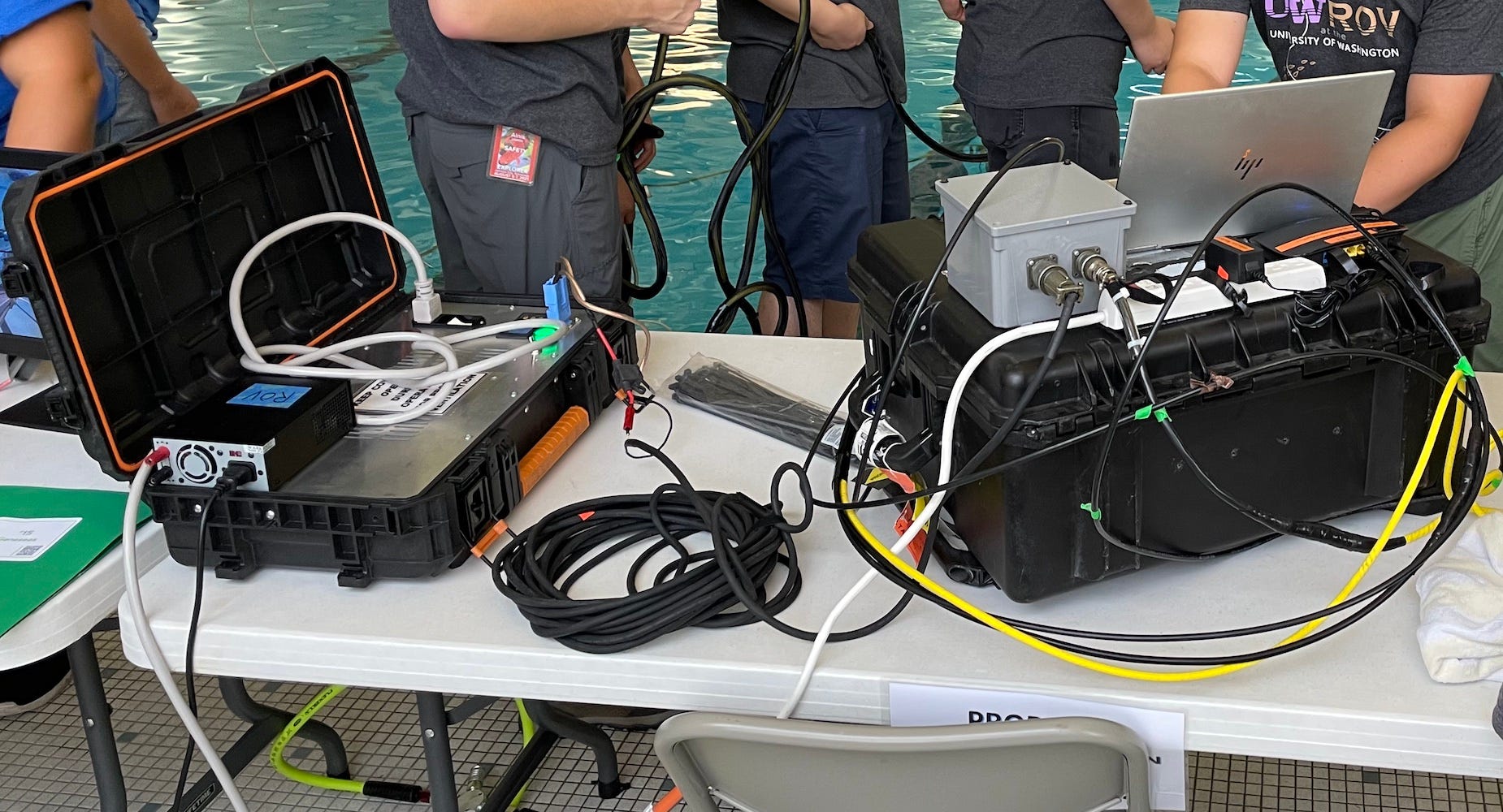
Other setup issues included a lack of good tether management, complicated software startup procedures, and a lack of strain relief on connections between surface-side components.
What we’re doing differently:
Explicitly consider deployability as a design problem (not just operations)
Consolidate surface station into a single, “grab’n’go” object
Limit setup activities to clips & plugs (no screwing, cable routing, or assembly)
Automate software startup as much as possible
Clearly document and communicate startup steps that are not automated
Establish effective tether management
Develop protocols and/or hardware and test them!
3. Maintainability is mandatory
You will need to access components for debugging, repairs, and replacements. Robots will break parts, and you will need to service them.
One issue we encountered was a long “critical path” of which components need to be taken off to access something. For example, our pressure hull was held together lengthwise by threaded rods, and these also served to mount the hull to the frame. Seems neat, right? Fewer parts?
Well, it made working on electronics in the housing painful. You could only open & close the housing while carefully juggling wrenches from both ends, while the ROV balances on blocks, all while trying to avoid pinching O-rings.
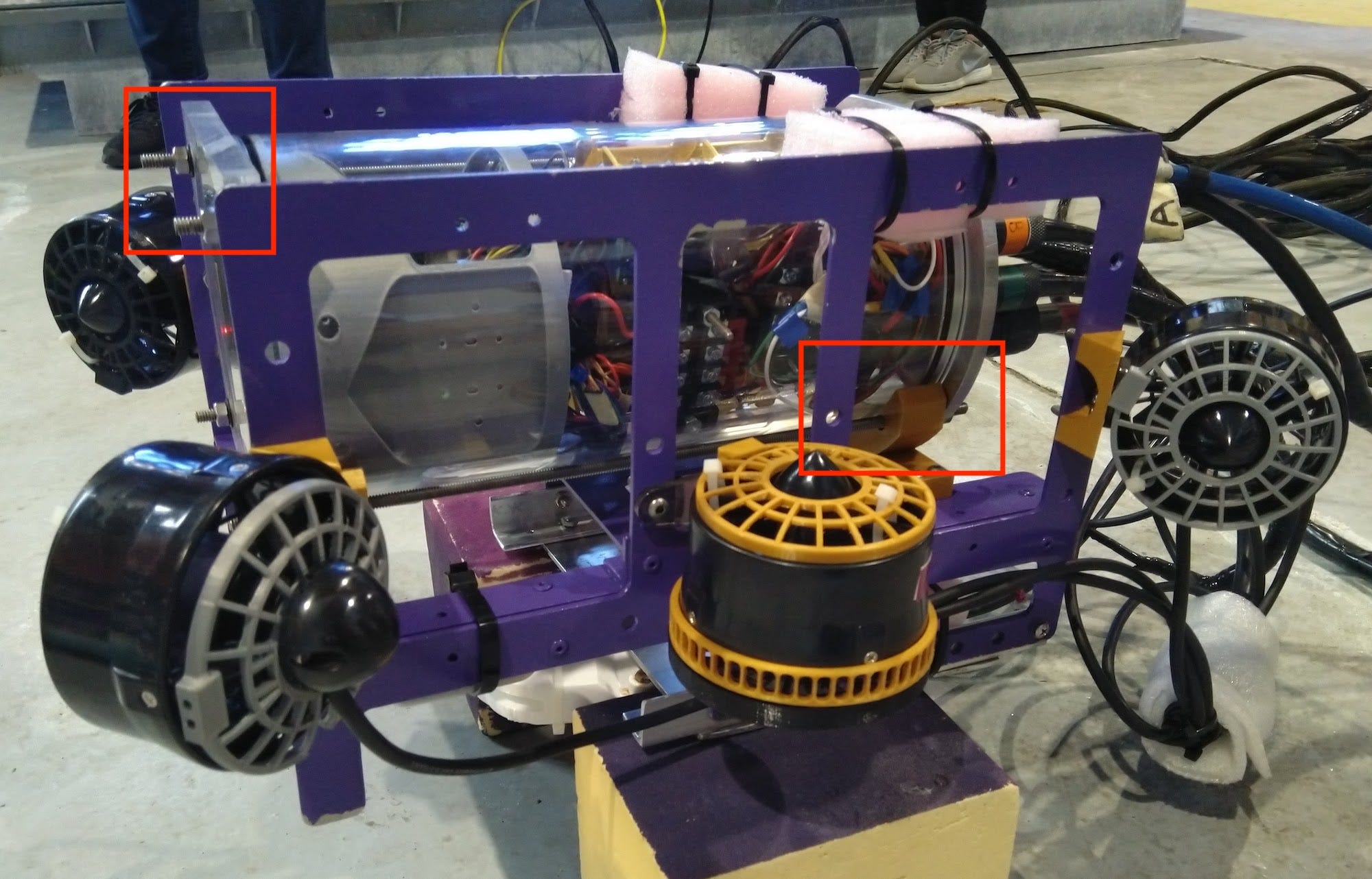
This wasn’t helped by the hard-to-constrain spaghetti wiring inside the electronics bay which always managed to stick itself into the O-ring seals on the end cap.
What we’re doing differently:
Standardized fasteners & connectors
An upcoming post will describe our choices & justifications for every fastener and connector we use. It won’t be a long post!
Simplification of electronics to use less wiring & fewer components
Upgrade O-ring design practices
Use largest O-rings possible to minimize pinch & leak risk
Follow manufacturer recommendations & standards for O-ring grooves
Discontinue use of face seals in favor of radial seals to avoid need for lengthwise clamping of pressure hull
Monitor assembly & maintenance feasibility in integrated CAD model
Can tools actually access all fasteners?
4. Shipping is pain
The ROV will arrive disassembled, regardless of whether you pack it assembled or disassembled. At least, if you use ground shipping and insufficient packaging.
It was not fun discovering this a couple hours before safety inspections when we first had the chance to open up the crate and take a look.
A thruster was broken off of the frame…
…Just about every screw was loose or missing…
…and our electronics bay was a complete mess.

I still don’t know how we managed to get it to pass safety inspections, given how we only had a couple hours, hand tools, and no scrap material for emergency fabrication… but that is a story for another day!
What we’re doing differently:
Disassemble the ROV before shipping
Bring critical components as carry-ons on the flight to ensure their safety
Bring a 200% quantity of 3D printed parts, electronics, and any other components that could become damaged
Use hard cases & assume any orientation may be achieved during shipping (instead of crates and being optimistic about “this side up”)
5. Bonus lessons
Some other problems we ran into, in no particular order:
Wires and connectors have drag underwater.
Keep them tidy!Are you sure you’re running those cables at safe currents?
Check that you’re using an appropriate gauge for wires, especially the tether!Strain relief for cables can’t be slapdash.
Use a proper solution like a wire mesh grip, not string/tape/glue/zip ties.Tether cables need to be held together to avoid tangles.
Use a mesh cable sleeve or some other non-zip-tie-method to hold it together.
Closing thoughts
We learned a lot by building Nautilus.
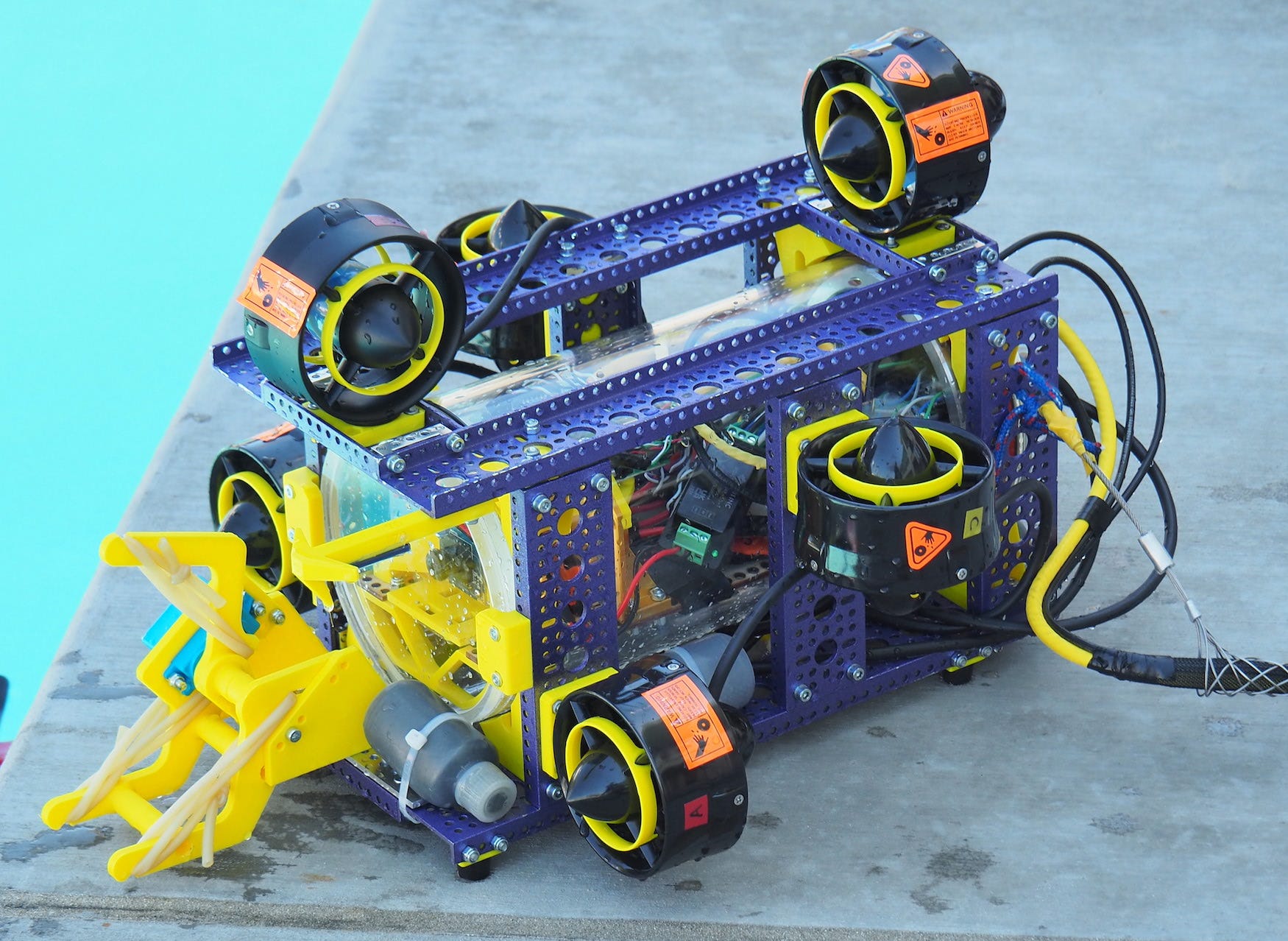
We took these lessons to heart when building Barreleye, our ROV for the 2022 season. We started with a clean sheet design, came up with something awesome, and smashed all of our team’s performance records while having a ton of fun.
In an upcoming blog, I’ll discuss how we applied these lessons in our upgraded engineering process to build Barreleye, and I think you’ll find it interesting.
Let me know if you have any questions or feedback!
Alnis
UWROV CTO
contact@alnis.dev